آموزش گام به گام پرواز با کوادکوپتر و هلی شات
سلام دوستان. احتمالا تا حالا اسم کوادکوپتر و هلی شات به گوشتون خورده. خیلی ها دغدغه دارند که بعد از خرید کوادکوپتر چطوری باید باهاش پرواز کنند. در این مقاله ، میخوایم بهتون آموزش بدیم که چطور با یه هلی شات پرواز کنید.
بخش اول: تعریف های کوادکوپتر
تعریف ها در این بخش به تعریف ها و اصطلاحات خاصی که در این حرفه استفاده میشود، پرداخته میشود. برخی از این تعاریف عبارتند از:
خط دید: مسیری است که خلبان میتواند کوادکوپتر خود را در طی پرواز مشاهده کند.
دید اول شخص (FPV): در این تکنیک یک دوربین روی پهپاد به عنوان چشم خلبان قرار دارد تا وی بتواند هرآنچه در زاویه دید پهپاد و در میدان دید آن قرار دارد را توسط دوربین مشاهده کند. در واقع چشم خلبان روی کوادکوپتر خود قرار دارد.
قطعات: موتورها، ملخها، ایرفریم یا بدنه، فرستنده، کنترلر و هر آن به وسیله ای که به شما اجازه میدهد تا کوادکوپتر خود را از راه دور کنترل کنید و تنظیمات آن را تغییر داده و تنظیم کنید به عنوان قطعات کوادکوپتر تلقی میشود.
ملخها: تنها بخش متحرک یک کوادکوپتر و مولتی روتور ملخ آن است که شدت چرخش آن بستگی به نوع کوادکوپتر، قطعات آن، کارایی و همچنین سرعت پهپاد بدون سرنشین شما دارد.
دوربین: بسیاری از کوادکوپترها مجهز به دوربینی برای ایجاد امکان ثبت و ضبط تصاویر هستند. از طرفی از جمله مهمترین کاربردهای یک کوادکوپتر، پهپاد یا مولتی روتور، تصویربرداری و فیلمبرداری هوایی است.
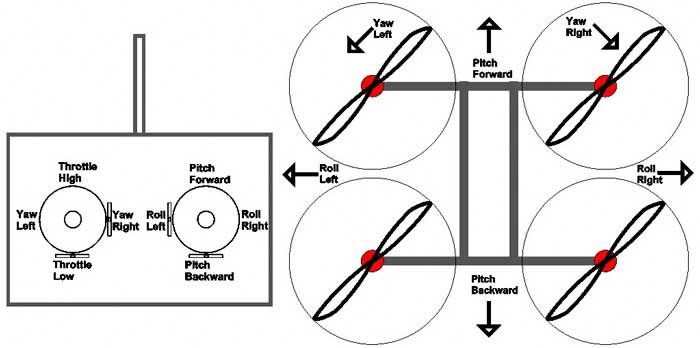
رادیو کنترل: رادیو کنترل تمام آن چیزیست که باعث میشود دستورات شما به عنوان خلبان به کوادکوپتر یا مولتی روتور شما برسد. بنابراین آشنایی کامل با آن برای هدایت صحیح پهپاد بدون سرنشین شما حائز اهمیت ویژهای است. استیک سمت چپ رادیو کنترل Yaw یا Throttle و استیک سمت راست رادیو کنترل Roll و Pitch میباشد. برخی از رادیو کنترلها این امکان را به خلبان میدهند تا این تنظیمات را بر اساس راحتی خود تغییر دهند.
Roll: با فشار استیک سمت راست رادیو کنترل به چپ و راست میتوانید Roll را تغییر دهید. Roll به معنای چرخش کوادکوپتر به سمت چپ و راست است.
Pitch: با فشار استیک سمت راست رادیو کنترل به بالا و پایین میتوانید Pitch را تغییر دهید. Pitch به معنای چرخش کوادکوپتر به جلو و عقب است.
Yaw: با فشار استیک سمت چپ رادیو کنترل به چپ و راست میتوانید Yaw را تغییر دهید. Yaw به معنای چرخش کوادکوپتر به دور محور عمودی خود است.
Throttle: با فشار استیک سمت چپ رادیو کنترل به بالا و پایین میتوانید Throttle را تغییر دهید. Throttle به معنای تنظیم سرعت چرخش ملخها و در نتیجه افزایش و کاهش ارتفاع کوادکوپتر است.
بخش دوم : آماده سازی کوادکوپتر قبل از پرواز
آمادهسازی قبل از پرواز در این بخش به بررسی مواردی که باید قبل از شروع پرواز با کوادکوپتر انجام دهید، میپردازیم. برخی از این موارد عبارتند از:
کالیبراسیون کوادکوپتر و چک کردن تنظیمات: تنظیم قطب نما از مهمترین تنظیمات قبل از پرواز است. همچنین قبل از پرواز باتری را کاملا شارژ کنید و چک کنید که ملخها به درستی نصب شده باشند و در مرحله آخر اخطارهای برنامه DJI Go را بررسی کنید و قبل از پرواز آن را برطرف نمایید.
تعیین ارتفاع برگشت به خانه (RTH): در حالت RTH کوادکوپتر به صورت اتوماتیک به ارتفاعی که تعیین کردهاید میرود و سپس به نقطهای که به عنوان خانه انتخاب کردهاید برمیگردد. توصیه میکنیم قبل از شروع پرواز حتما ارتفاع برگشت به خانه را تعیین کنید زیرا باعث میشود که کوادکوپتر شما در مسیر برگشت به خانه به موانع برخورد نکند. این تنظیمات را در برنامه DJI Go باید انجام دهید.
چک کردن سیگنال GPS: زمانی پرواز خود را شروع کنید که حداقل 10 ماهواره را شناسایی کرده باشید و خط آیکن GPS بیشتر از 4 باشد زیرا برای داشتن یک پرواز ایمن و مطمئن داشتن سیگنال GPS قوی مهم و ضروری است.
بخش سوم: تکنیکهای پرواز با کوادکوپتر
در این بخش به آموزش تکنیکهای پرواز با کوادکوپتر میپردازیم. برخی از این تکنیکها عبارتند از:
روشن کردن موتورها: پس از فشردن دکمه روشن و خاموش بر روی پرنده و ریموت کنترل و روشن کردن کامل آنها باید موتورها را روشن کنید. برای این کار باید استیکهای رادیو کنترل را به سمت گوشههای پایین چپ و راست حرکت دهید و نگه دارید تا موتورها شروع به چرخش کنند.
تیکاف یا بلند شدن: با کمک اهرم گاز صورت میگیرد. برای تیکاف کافی است اهرم گاز را به سمت بالا حرکت دهید تا کوادکوپتر از زمین جدا شود. سعی کنید در ابتدای پرواز کوادکوپتر خود را در حالت معلق نگه دارید و از پایداری هوایی آن مطمئن شوید.
هورینگ یا نگه داشتن کوادکوپتر در حالت معلق: برای این کار باید تعادل استیکهای رادیو کنترل را حفظ کنید و هرگونه حرکت ناخواسته را با استفاده از استیکهای Roll، Pitch و Yaw جبران کنید. هورینگ یک تمرین خوب برای تقویت مهارتهای خلبانی است.
حرکت به جلو، عقب، چپ و راست: برای این کار باید استیک سمت راست رادیو کنترل را به سمت مورد نظر حرکت دهید. به عنوان مثال، برای حرکت به جلو، استیک سمت راست رادیو کنترل را به سمت بالا حرکت دهید. در این حالت، کوادکوپتر Pitch مثبت خواهد داشت و به جلو خواهد پیش رفت. برای حرکت به عقب، استیک سمت راست رادیو کنترل را به سمت پایین حرکت دهید. در این حالت، کوادکوپتر Pitch منفی خواهد داشت و به عقب خواهد پیش رفت. برای حرکت به چپ، استیک سمت راست رادیو کنترل را به سمت چپ حرکت دهید. در این حالت، کوادکوپترل Roll مثبت خواهد داشت و به چپ خواهد پیش رفت. برای حرکت به راست، استیک سمت راست رادیو کنترل را به سمت راست حرکت دهید. در این حالت، کوادکوپتر Roll منفی خواهد داشت و به راست خواهد پیش رفت.
چرخش به چپ و راست: برای این کار باید استیک سمت چپ رادیو کنترل را به سمت چپ و راست حرکت دهید. به عنوان مثال، برای چرخش به چپ، استیک سمت چپ رادیو کنترل را به سمت چپ حرکت دهید. در این حالت، کوادکوپتر Yaw منفی خواهد داشت و به دور محور عمودی خود به چپ خواهد چرخید. برای چرخش به راست، استیک سمت چپ رادیو کنترل را به سمت راست حرکت دهید. در این حالت، کوادکوپتر Yaw مثبت خواهد داشت و به دور محور عمودی خود به راست خواهد چرخید.
افزایش و کاهش ارتفاع: برای این کار باید استیک سمت چپ رادیو کنترل را به بالا و پایین حرکت دهید. به عنوان مثال، برای افزایش ارتفاع، استیک سمت چپ رادیو کنترل را به سمت بالا حرکت دهید. در این حالت، کوادکوپتر Throttle مثبت خواهد داشت و ملخهای آن با سرعت بیشتری خواهند چرخید و در نتیجه از نیروی جذب زمین غلبه میکند و ارتفاع میگیرد. برای کاهش ارتفاع، استیک سمت چپ رادیو کنترل را به سمت پایین حرکت دهید. با این کار، کوادکوپتر Throttle منفی خواهد داشت و ملخهای آن با سرعت کمتری خواهند چرخید و در نتیجه نیروی جذب زمین بر آن غلبه میکند و ارتفاع آن کاهش مییابد.
فرود: برای فرود کافی است استیک سمت چپ رادیو کنترل را به سمت پایین حرکت دهید تا کوادکوپتر به آرامی از ارتفاع بیاید. سعی کنید فرود را در یک محل صاف و بدون مانع انجام دهید. پس از فرود، استیکهای رادیو کنترل را به سمت گوشههای پایین چپ و راست حرکت دهید و نگه دارید تا موتورها خاموش شوند.
برگشت به خانه (RTH): در صورتی که کوادکوپتر شما از دسترس خارج شده باشد یا باتری آن به حد نصاب رسیده باشد، میتوانید از حالت RTH استفاده کنید. برای این کار باید دکمه RTH را روی رادیو کنترل فشار دهید تا کوادکوپتر به صورت خودکار به ارتفاع تعیین شده بالا برود و سپس به نقطهای که به عنوان خانه انتخاب کردهاید برگشته و فرود آید. شما همچنین میتوانید در هنگام پرواز با استفاده از استیکهای رادیو کنترل جلوگیری از برخورد با مانع در مسیر RTH کنید.

بخش چهارم: نکات و راهنمای عیبیابی
در این بخش به برخی از مشکلات رایج و راههای حل آنها میپردازیم. برخی از این مشکلات عبارتند از:
کوادکوپتر شما پرواز نمیکند: این مشکل ممکن است به دلایل مختلفی رخ دهد. برخی از راههای حل آن عبارتند از:
چک کردن باتری کوادکوپتر و رادیو کنترل و اطمینان از شارژ کافی آنها.
چک کردن نصب صحیح ملخها و اطمینان از عدم خرابی یا شکستگی آنها.
چک کردن تطابق فرکانس رادیو کنترل و کوادکوپتر و اطمینان از برقراری ارتباط بین آنها.
چک کردن تنظیمات کوادکوپتر و رادیو کنترل و اطمینان از صحت آنها.
کوادکوپتر شما پایدار پرواز نمیکند: این مشکل ممکن است به دلایل مختلفی رخ دهد. برخی از راههای حل آن عبارتند از:
کالیبراسیون قطب نما و جایروسکوپ کوادکوپتر و اطمینان از صحت آنها.
تعویض ملخهای فرسوده یا شکسته با ملخهای جدید و سالم.
تعویض موتورهای ضعیف یا خراب با موتورهای جدید و سالم.
تعویض باتری قدیمی یا خالص با باتری جدید و سالم.
کوادکوپتر شما به خانه بر نمیگردد: این مشکل ممکن است به دلایل مختلفی رخ دهد. برخی از راههای حل آن عبارتند از:
تعیین صحیح نقطه خانه قبل از شروع پرواز و اطمینان از درست بودن آن.
داشتن سیگنال GPS قوی در هنگام پرواز و اطمینان از شناسایی حداقل 10 ماهواره توسط کوادکوپتر.
پایان مقاله
در این مقاله به آموزش قدم به قدم پرواز با کوادکوپتر پرداختیم. امیدواریم که این مقاله برای شما مفید و جذاب بوده باشد و شما را در یادگیری و لذت بردن از پرواز با کوادکوپتر یاری کرده باشد. اگر سوال یا نظری در مورد این مقاله دارید، میتوانید آن را در قسمت سوالات و پاسخ مطرح کنید. همچنین اگر علاقهمند به یادگیری بیشتر در مورد کوادکوپترها هستید، میتوانید از منابع معرفی شده استفاده کنید. با تشکر از همراهی شما.🙏